您当前位置:首页 编程工具 RobotStudio6.08下载安装

类型:编程工具 版本:最新版本
大小:2.21G 时间:2026-05-06

RobotStudio 6.08中文破解版是一款面向工业机器人应用的高性能仿真与编程平台,特别适用于ABB机器人系统的离线工作,允许用户在虚拟环境中提前验证工作站节拍、排查碰撞风险,从而大幅降低现场调试成本与项目实施风险。

1.下载完成后,鼠标右击【RobotStudio 6.08】压缩包,选择【解压至此】

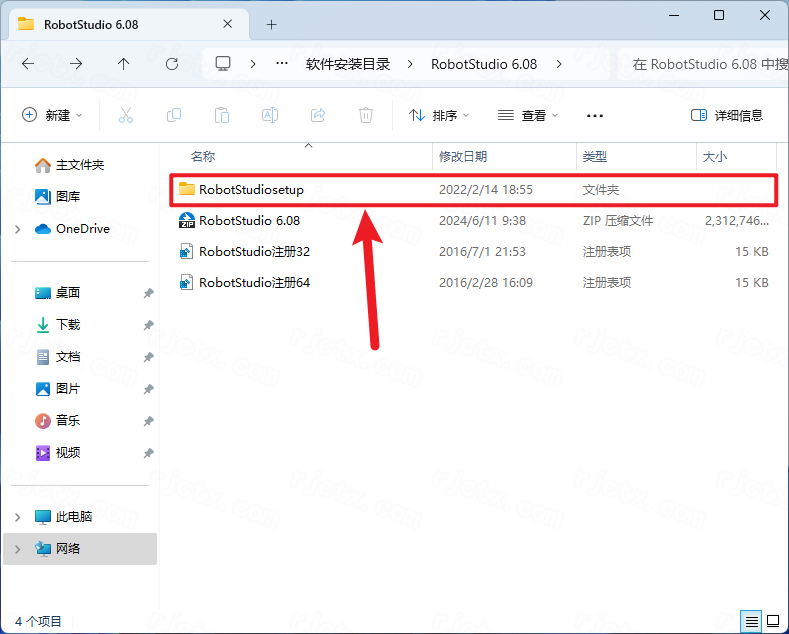
2.找到【RobotStudiosetup】文件夹,右键【打开】它
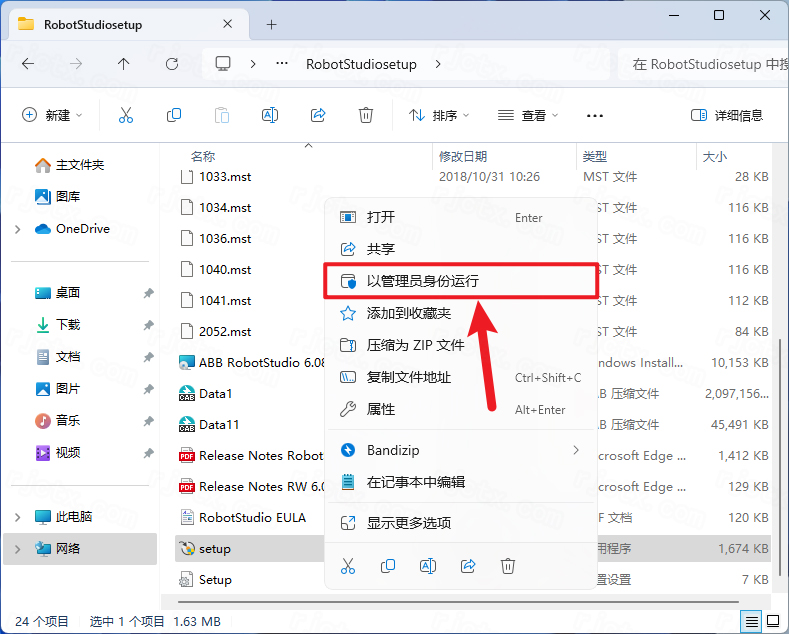
3.找到【setup】应用程序,右键选择【以管理员身份运行】它
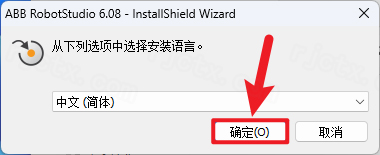
4.点击【确定】
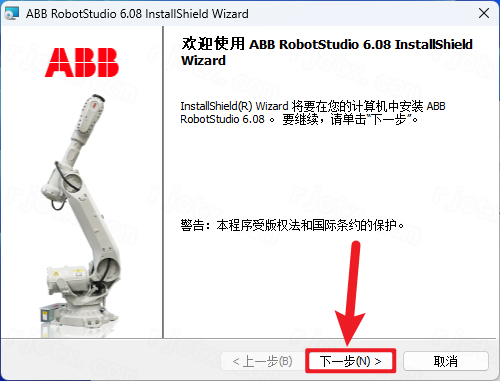
5.点击【下一步】
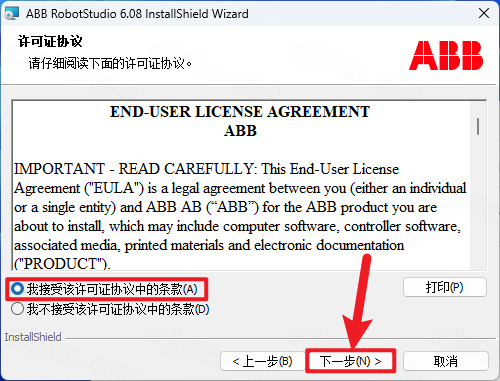
6.勾选【我接受】,再点击【下一步】
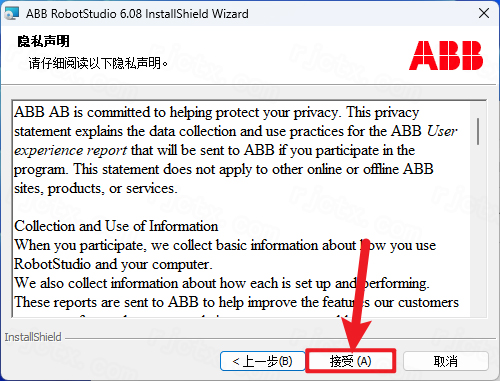
7.点击【接受】
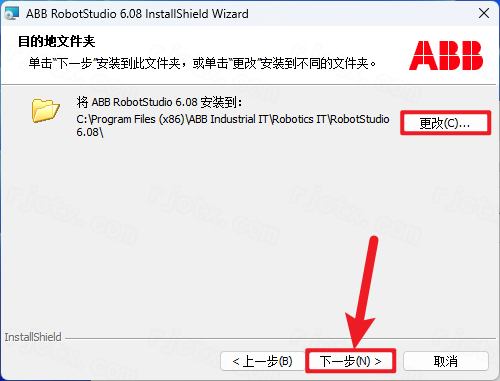
8.软件默认安装在C盘,可自定义更改软件安装位置,点击【下一步】
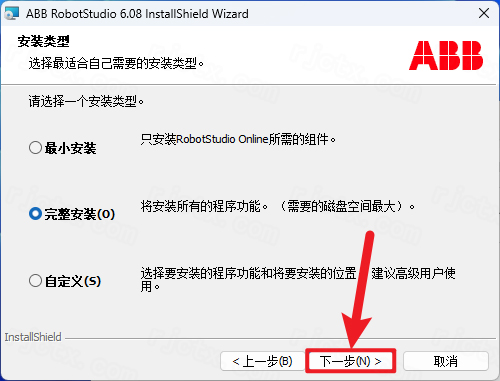
9.点击【下一步】
10.点击【安装】
11.软件安装中,稍等片刻
12.点击【下载并安装此功能】
13.Windows功能安装中
14.点击【关闭】
15.点击【完成】
16.回到RobotStudio 6.08文件夹,找到【RobotStudio注册64】文件,右键【打开】它
17.点击【是】
18.点击【确定】
19.回到桌面,右键桌面上的【RobotStudio 6.08软件图标】,点击【打开】

20.点击【取消】
21.安装完成
高保真虚拟仿真
基于ABB虚拟控制器,精准模拟机器人运动轨迹、关节姿态与动作逻辑,支持多机器人协同仿真,碰撞检测功能可提前预警干涉风险。
离线编程与程序复用
提供RAPID语言编程环境,支持示教点创建、路径规划与程序调试;离线编写的程序可直接下载至实体机器人,无需现场重复编程。
多格式CAD模型导入
兼容IGES、STEP、VRML、VDAFS、ACIS等主流CAD格式,支持模型缩放、位置调整与属性编辑,快速构建虚拟工作站环境。
工作站快速搭建
内置ABB全系列机器人模型库,可直接添加机器人、工装夹具、传送带等设备,支持自定义机械装置与工具坐标系,快速完成工作站布局。
手动操纵与轨迹优化
支持关节、线性、重定位三种手动操纵模式,可通过拖拽精准调整机器人姿态;AutoPath功能自动生成最优运动轨迹,减少编程时间。
仿真分析与报告生成
可模拟生产节拍、分析运动周期,支持仿真过程录制与回放;内置数据统计工具,可生成碰撞报告、运动时间分析报告等。
在线连接与程序同步
支持与实体机器人在线通信,可上传/下载程序、同步配置文件,实现虚拟调试与现场生产的联动,便于程序更新与故障排查。
常见原因
系统资源不足:CPU/内存占用过高,无法支撑虚拟控制器运行。
许可证服务异常:ABBLicenseManager服务未启动或授权失效。
软件/组件损坏:安装文件缺失、虚拟控制器组件未注册或版本不兼容。
网络/端口冲突:防火墙拦截通信端口,或虚拟网络设备与控制器冲突。
项目文件/配置损坏:当前工作站文件异常或用户配置缓存出错。
解决方法
释放系统资源
关闭其他占用CPU/内存的程序(如大型软件、浏览器多标签),以管理员身份运行RobotStudio,减少权限限制。
检查并重启许可证服务
按Win+R输入services.msc,找到ABBLicensingService/FlexNetLicensingService,确认状态为“正在运行”;
若未运行,右键选择“启动”;若启动失败,重新安装许可证组件或导入有效授权文件。
修复/重装软件组件
运行安装程序,选择“Repair”修复损坏文件;
若无效,卸载软件,清理安装目录与注册表,重新安装6.08版本并完整勾选虚拟控制器组件。
排查网络与防火墙
临时关闭第三方杀毒软件与防火墙,或在防火墙中添加RobotStudio放行规则(端口8080、443、27000);
设备管理器中禁用多余虚拟网卡(如VMware、VirtualBox虚拟适配器),避免端口冲突。
重置配置与重建项目
关闭软件,删除C:\Users\[用户名]\AppData\Local\ABB\RobotStudio缓存文件夹,重启软件;
新建空白工作站,重新添加机器人与虚拟控制器,排除原项目文件损坏问题。
版本兼容与系统更新
确认操作系统为64位Windows10/7(兼容6.08),安装最新系统补丁与VC++运行库,避免系统兼容性问题。
原因
未购买/激活Premium全功能许可证,当前为Lite版(仅基础仿真)。
许可证文件丢失、过期、路径错误或与软件版本不匹配。
安装时未勾选VirtualController、高级仿真等Premium组件。
解决方法
检查授权状态
打开RobotStudio→Help→LicenseManager,查看授权类型:若为“Lite”,则无全功能权限;确认许可证有效期与绑定主机ID(MAC地址)。
导入有效全功能许可证
购买ABBRobotStudioPremium授权,登录MyABB账户下载对应版本许可证文件(.lic/.xml);
将许可证文件放入默认路径C:\ProgramData\ABB\Robotics\LicenseFiles(隐藏文件夹,需手动创建);
以管理员身份打开LicenseManager,选择“ImportLicense”导入文件,激活全功能权限。
修复安装,补全组件
运行6.08安装程序,选择“Modify”,在组件列表中勾选VirtualController、AdvancedSimulation、RAPIDFullEditor等Premium组件,完成安装后重启软件。
离线授权激活(无网络时)
LicenseManager中选择“RequestOfflineLicense”,生成请求文件;
将文件发送给ABB授权支持,获取离线许可证文件并导入,完成激活。
临时替代方案
若暂无全功能授权,可使用Lite版基础功能(简单仿真、基础编程),待授权到位后再解锁高级功能。
关闭杀毒软件进行安装和激活,附带激活补丁,请按照激活教程的每一步进行安装,否则可能安装失败。
本地下载卡顿的用户,推荐可以使用页面的网盘下载链接跳转网盘高速下载。








0.2.2官方免费版")