您当前位置:首页 编程工具 RobotStudio2022破解激活版下载

类型:编程工具 版本:最新版
大小:1.97G 时间:2026-05-06
RobotStudio 2022中文免费版是一款引领工业自动化数字化转型的标杆级离线编程与仿真平台,使工程师能够在办公室PC上独立完成机器人程序的编写与调试工作,是工业自动化领域提升效率、实现智能化升级的重要支撑。

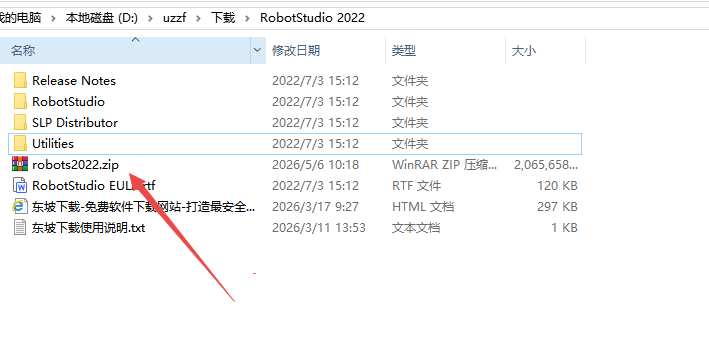
1.下载完成后,鼠标右击【RobotStudio 2022】压缩包,选择【解压至此处】
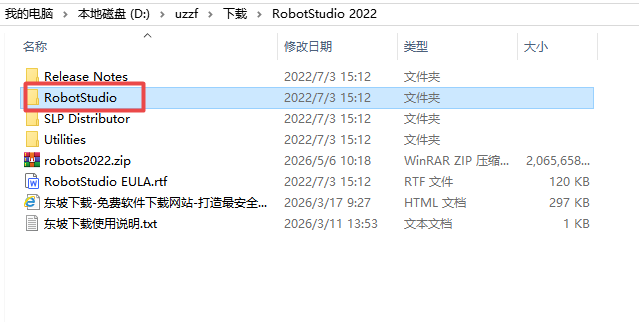
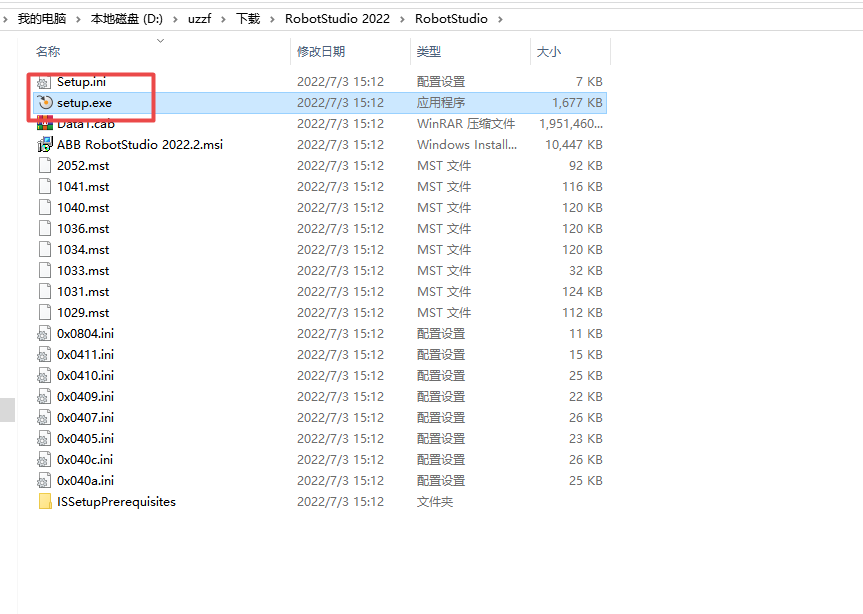
2.找到【RobotStudio】文件夹,右键【打开】它
3.找到【setup】应用程序,右键选择【以管理员身份运行】它
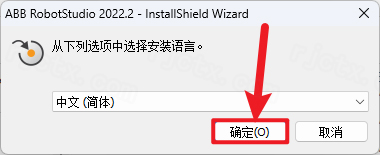
4.点击【确定】
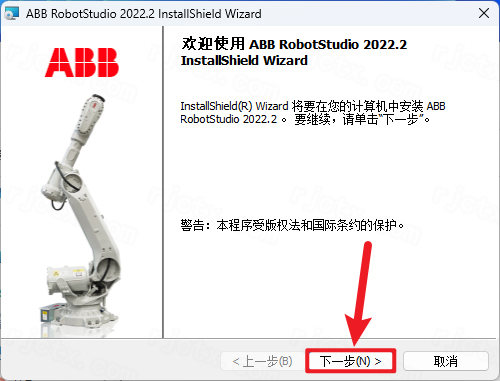
5.点击【下一步】
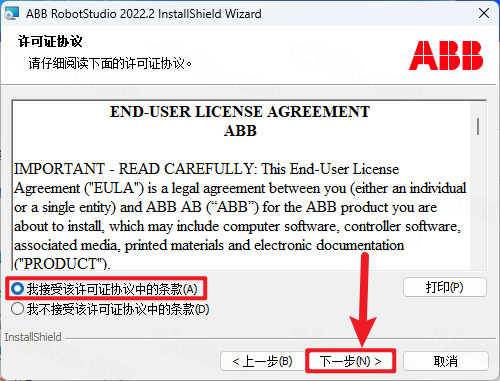
6.勾选【我接受】,再点击【下一步】
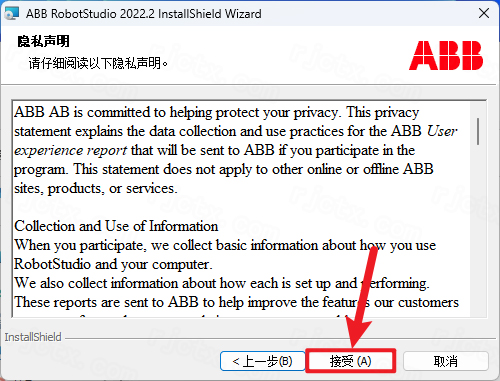
7.点击【接受】
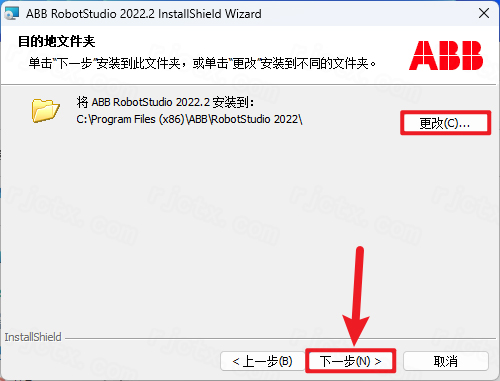
8.软件默认安装在C盘,可自定义更改软件安装位置,点击【下一步】
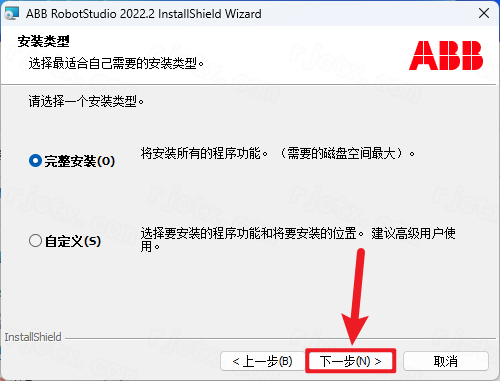
9.点击【下一步】
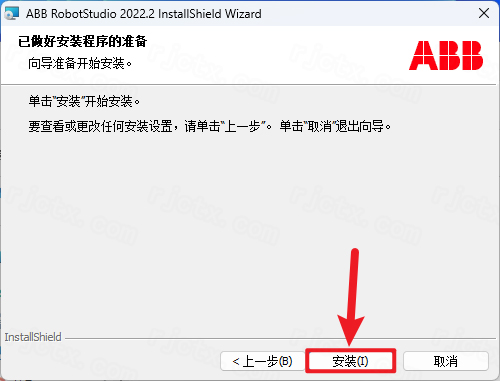
10.点击【安装】
11.软件安装中,稍等片刻
12.点击【完成】
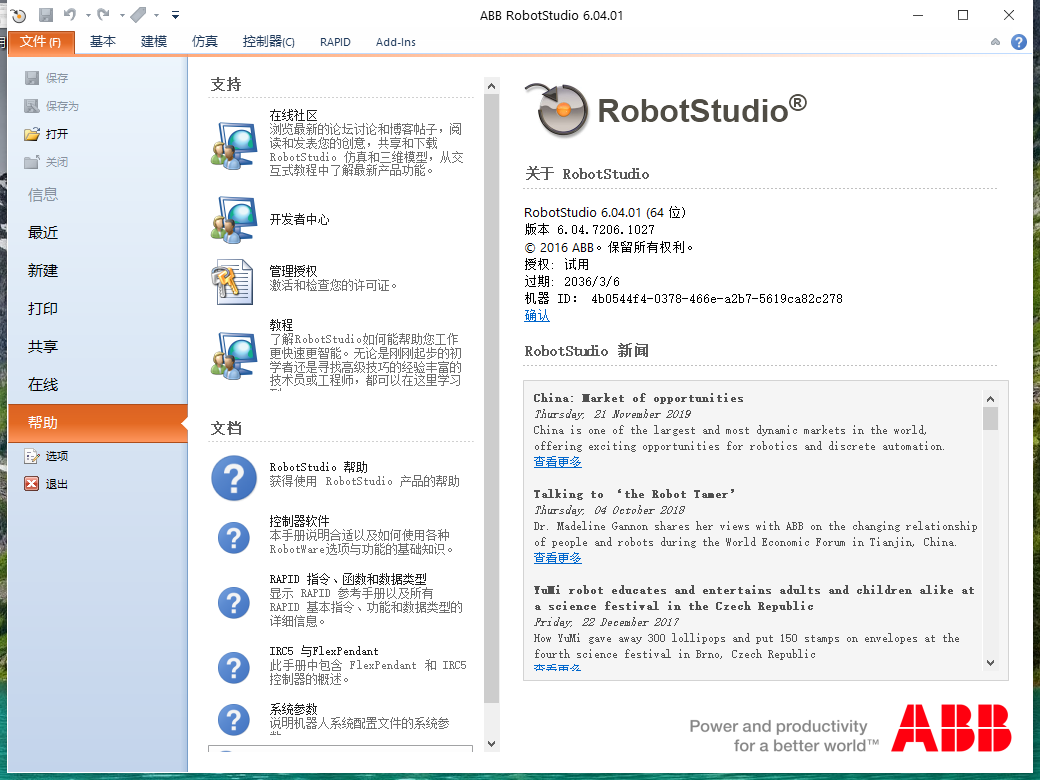
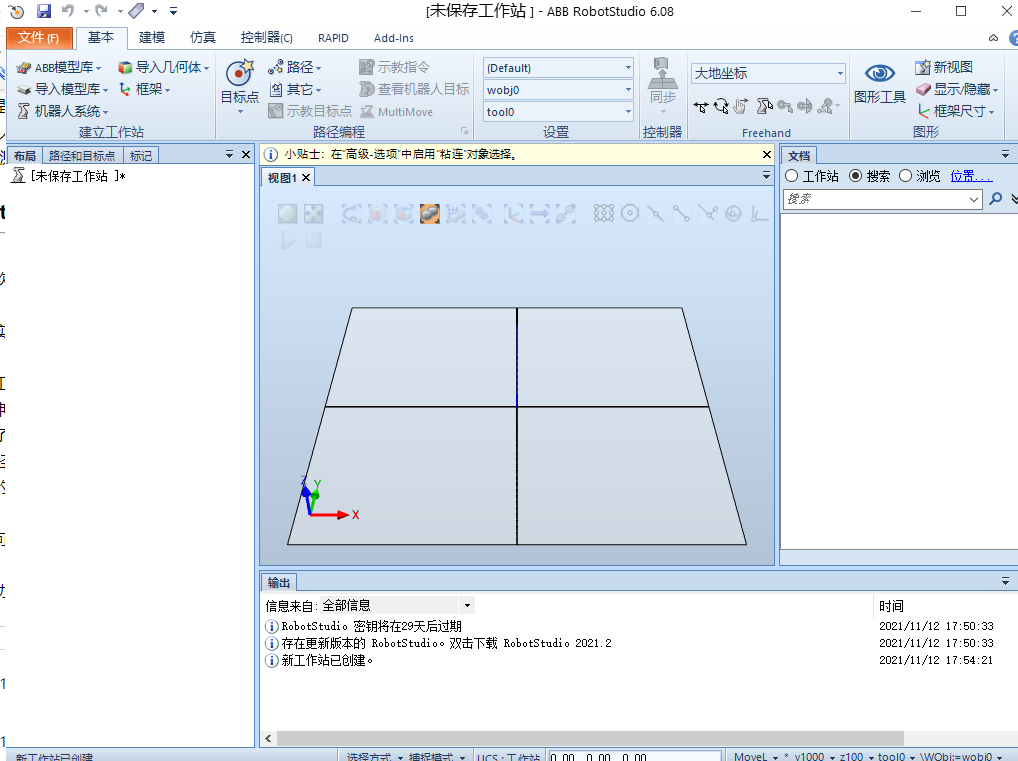
13.回到桌面,右键桌面上的【RobotStudio 2022软件图标】,点击【打开】

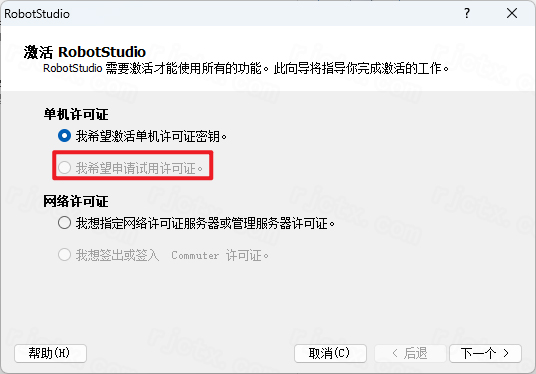
14.勾选【我希望申请使用许可证】,再点击【取消】
15.点击【是】
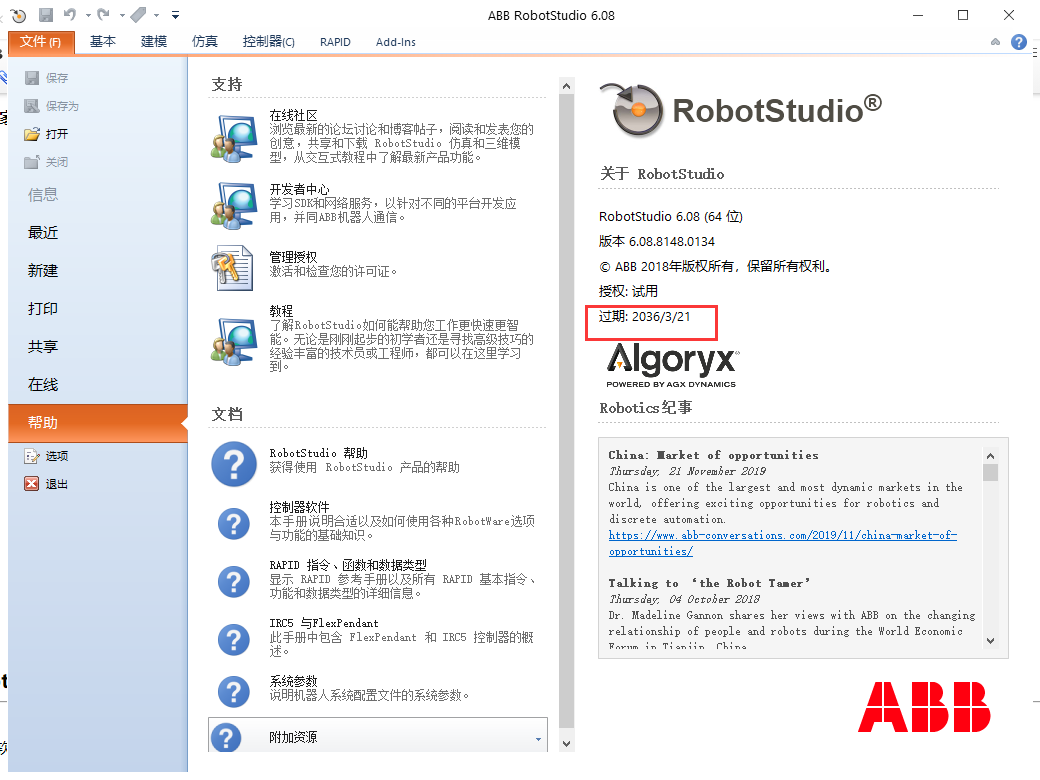
16.安装完成
智能无碰撞路径规划:这是2022版本的核心亮点之一。软件能够自动计算并生成避开障碍物(如夹具、围栏)的运动轨迹,无需手动逐点示教,极大地提升了编程效率和路径安全性。
专业的机加工PowerPac:内置强大的机加工应用包,支持导入CAD模型后自动生成复杂的3D加工路径(如铣削、打磨、去毛刺),并能自动优化刀具姿态,避免奇异点。
高保真虚拟控制器:基于ABB真实的控制器内核,确保虚拟环境中的运动学、动力学及RAPID代码执行逻辑与真机100%一致,实现“所见即所得”。
云端协作与数字孪生:支持通过云端版进行实时团队协作,工程师可以在世界任何地方同步查看和修改工作站设计;同时支持虚拟会议,方便向客户展示方案。
扩展性与兼容性:支持多种插件扩展,能够导入主流CAD格式(STEP,IGES等),并具备强大的物理仿真能力,可模拟重力、摩擦力等真实物理环境。
前提准备
备份文件:从机器人示教器(备份与恢复→备份当前系统)导出,保存至U盘,包含system.xml及程序、配置文件夹。
版本匹配:确认备份文件的RobotWare版本,在RobotStudio中通过Add-Ins安装对应版本(路径无中文/空格)。
操作步骤
连接U盘并准备文件
将存储备份文件的U盘插入电脑,确保备份文件夹路径无中文、空格或特殊字符(如D:\RobotBackup\20220506)。
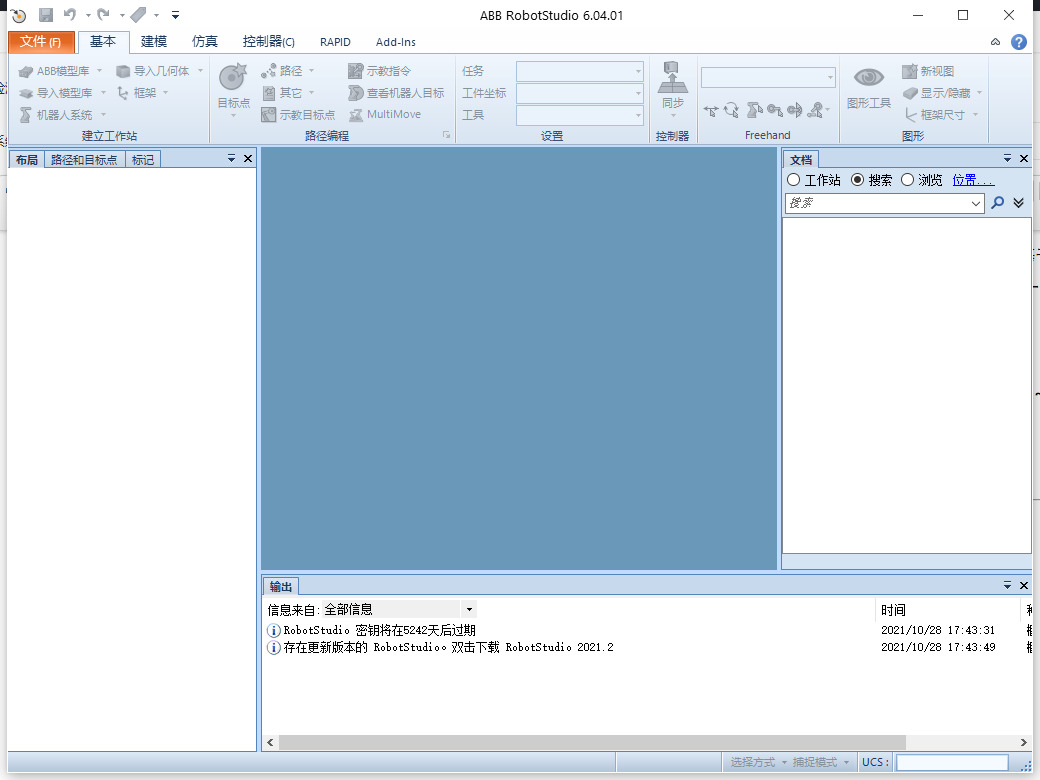
新建工作站并创建控制器
打开RobotStudio→点击新建→选择工作站和机器人解决方案→确定。
进入控制器选项卡→点击添加控制器→选择从备份创建。
浏览选中U盘中的备份文件夹→确认RobotWare版本→点击创建,生成虚拟控制器。
加载程序并验证
左侧项目树展开控制器→程序,查看并打开备份的RAPID程序。
点击启动虚拟示教器,验证程序运行与机器人运动仿真是否正常。
常见问题解决
路径报错:备份文件存放路径严禁中文、空格或特殊字符,建议放在纯英文路径下。
版本不匹配:在Add-Ins中下载并安装备份对应的RobotWare版本,重启软件后重试。
方法1:同一工作站内复制(简单程序)
打开项目→左侧项目树展开控制器→程序。
右键目标程序(如main.prg)→选择复制→右键目标位置(如另一程序文件夹)→选择粘贴。
双击粘贴后的程序,验证代码完整性与运行逻辑。
方法2:不同控制器/工作站间复制(跨项目)
导出程序:
左侧项目树展开源控制器→程序→右键目标程序→选择导出模块。
选择保存路径(无中文)→输入文件名→点击保存(生成.mod或.prg文件)。
导入程序:
打开目标工作站/控制器→左侧项目树展开程序→右键选择导入模块。
浏览选中导出的程序文件→点击打开→完成导入。
验证与同步:双击导入的程序,检查代码与依赖关系;同步至虚拟控制器,验证运行正常。
方法3:复制整个程序包(含模块与数据)
右键源控制器→选择保存程序包→选择保存路径→输入文件名→点击保存(生成.rspkg文件)。
右键目标控制器→选择加载程序包→浏览选中.rspkg文件→点击加载→完成批量复制。
注意事项
复制前确保源与目标控制器的RobotWare版本兼容,避免语法报错。
复制含工具/工件数据的程序时,需同步复制对应的tooldata/wobjdata,避免运行异常。
关闭杀毒软件进行安装和激活,附带激活补丁,请按照激活教程的每一步进行安装,否则可能安装失败。
本地下载卡顿的用户,推荐可以使用页面的网盘下载链接跳转网盘高速下载。








0.2.2官方免费版")